
 EN
EN
 EN
EN ZH
ZH IT
IT ES
ES TH
TH TR
TR JA
JA PT
PT KO
KO RU
RU FR
FR DE
DE AR
AR
 Zuhause > Produktzentrum > Planetarisches Gelenkmodul > LZ5710 Leichtes Planetengelenkmodul mit geringer Belastung
Zuhause > Produktzentrum > Planetarisches Gelenkmodul > LZ5710 Leichtes Planetengelenkmodul mit geringer Belastung
LZ5710 Leichtes Planetengelenkmodul mit geringer Belastung
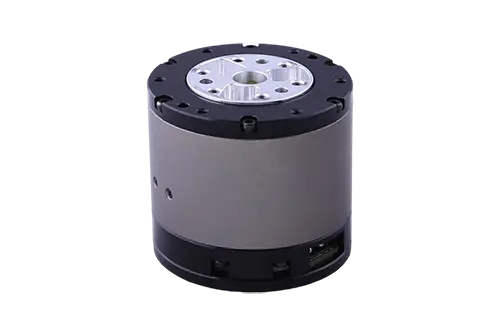
Gewicht: 1420 g ± 20 g
Anzahl der Pole: 42 Pole
Anzahl der Phasen: 3 Phasen
Antriebsmethode: FOC (Feldorientierte Steuerung)
Untersetzungsverhältnis: 10:1
Vollständige Hardware-FOC-Technologie, FPGA-Entwicklung auf Chip-Ebene
Hohlverkabelung
Triple-Loop-Steuerung mit allen Frequenzen bei 20 kHz für schnelle Reaktion
etherCat/canOpen Bus
16-Bit-ADC mit 1 MHz Abtastrate
Power-Off-Bremse
Die Kerntechnologie des Produkts liegt im harmonisch integrierten Verbindungsmodul mit integriertem Antriebs- und Steuerungsdesign. Die Innenrotorstruktur ermöglicht eine hohle Verkabelung, während vielfältige Modelloptionen, darunter die Serien 11, 14, 17, 20, 25, 32 und 40, flexible Anwendungen gewährleisten. Mit einem kompakten und miniaturisierten Profil und geringem Stromverbrauch verfügt es über einen Stiftbremsmechanismus, der bei Stromausfall sofort eine mechanische Verriegelung auslöst, mit einer Aktionszeit von weniger als 10 ms.
Das Design mit zwei Stahlrädern, bei dem Kreuzrollenlager in Stahlräder integriert sind, reduziert den axialen Platzbedarf. Durch das Ineinandergreifen von zwei Stahlrädern mit einem Flexspline wird die Belastung durch Flexspline-Verformung gemindert und ein reibungsloser Betrieb, hohe Effizienz und Positionierungsgenauigkeit von bis zu 20 Bogensekunden erreicht.
Ultrakompaktes, leichtes Design
Abmessungen: Durchmesser Ø57 mm × Höhe 46 mm, Gewicht nur 300 g – dies ist ein kompaktes Gelenkmodul.
Nicht hohle Struktur mit einfacherem Design und geringeren Kosten, geeignet für Endverbindungen, die keine Verkabelung erfordern.
Ausgereifte Antriebs- und Kommunikationslösungen
Antriebsmodus: Feldorientierte FOC-Steuerung mit Dreifachschleifensteuerung für Drehmoment, Geschwindigkeit und Position – ideal für hochpräzise Gelenksteuerung.
Kommunikation: CAN/CAN FD-Schnittstelle, kompatibel mit gängigen Robotersteuerungen, einfache Verkabelung und starke Entstörungsfähigkeit.
Dual-Magnet-Encoder-Konfiguration: Magnet-Encoder + Dual-Encoder, unterstützt duale Regelung sowohl auf der Motorseite als auch auf der Ausgangsseite, um die Positionierungsgenauigkeit zu verbessern.
Zuverlässigkeit und Umweltanpassungsfähigkeit
Temperaturbereich: -20 bis 60 °C, deckt typische Betriebsbedingungen von Innen- bis Halbaußenumgebungen ab.
Lärm: ≤55 dB(A); geräuscharmes Design, ideal für Mensch-Roboter-Kollaborationsszenarien.
Isolationsklasse: Klasse B, gewährleistet langfristige Betriebszuverlässigkeit.
Lagertyp: Rillenkugellager, einfacher Aufbau, geringe Wartungskosten.
Bei diesem LZ5710N handelt es sich um ein leichtes Plug-and-Play-Verbindungsmodul mit geringem Stromverbrauch, das für Anwendungen mit geringer Last entwickelt wurde. Zu den wichtigsten Vorteilen gehören: ein Nenndrehmoment von 3 Nm, ein geringes Spiel von nur 7 Bogenminuten, FOC-gesteuerte Steuerung, CAN-Kommunikation und zwei magnetische Encoder. Es eignet sich ideal als Endeffektor-, Hand- oder Knöchelgelenk für Exoskelette oder kollaborative Roboter und eignet sich auch perfekt für die schnelle Entwicklung kleiner Bildungs- und Forschungsroboter.
| Modell | LZ4610N Nicht hohl | LZ4605N Nicht hohl | LZ5710N Nicht hohl | LZ5740N Nicht hohl | LZ5736N Nicht hohl | LZ807.75N Nicht hohl | LZ8025CN Nicht hohl | LZ10028CH Hohlwelle | LZ12028CH Hohlwelle |
|---|---|---|---|---|---|---|---|---|---|
| Reduzierertyp | Planetarisch | Planetarisch | Planetarisch | Planetarisch | Planetarisch | Planetarisch | Planetarisch | Planetarisch | Planetarisch |
| Drive&Control-Methode | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
| Abmessungen Durchmesser × Höhe (mm) | Φ46×38 | Φ46×38 | Φ57×46 | Φ57×60 | Φ57×70 | Φ80×47 | Φ80×60,5 | Φ100×68 | Φ120×80 |
| Übersetzungsverhältnis | 10 | 5 | 10 | 40 | 36 | 7,75 | 25 | 28 | 28 |
| Nenndrehmoment (N・m) | 0,85 Nm | 0,4 Nm | 3,4 Nm | 12 Nm | 29 Nm | 7,75 Nm | 27 Nm | 67,5 Nm | 126 Nm |
| Spitzendrehmoment (N・m) | 2,55 Nm | 1,2 Nm | 10,2 Nm | 36 Nm | 80 Nm | 23,2 Nm | 81 Nm | 200 Nm | 378 Nm |
| Magnetischer Encoder | Dual-Encoder | Dual-Encoder | Dual-Encoder | Dual-Encoder | Dual-Encoder | Dual-Encoder | Dual-Encoder | Dual-Encoder | Dual-Encoder |
| Nennleistung (W) | 83 | 30 | 94 | 94 | 300 | 400 | 380 | 733 | 1570 |
| Nennspannung (V) | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V |
| Kommunikationsmodus | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CANFD/Ether CAT | CANFD/Ether CAT |
| Betriebstemperaturbereich (°C) | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~60°C | -20~70°C | -20~70°C | -20~80°C | -20~80°C |
| Isolationsklasse | Klasse B | Klasse B | Klasse B | Klasse B | Klasse B | Klasse B | Klasse B | Klasse B | Klasse B |
| Leerlaufdrehzahl (U/min) | 110 | 220 | 210 | 112 | 130 | 645 | 156 | 143 | 140 |
| Nenngeschwindigkeit (U/min) | 80 | 160 | 140 | 80 | 100 | 516 | 120 | 110 | 107 |
| Nennstrom (Apk) | 1.3 | 4.5 | 3 | 6 | 8 | 10.4 | 10.7 | 22 | 41.6 |
| Spitzenstrom (Apk) | 3.8 | 13.5 | 9 | 9 | 16 | 20.8 | 30 | 66 | 83,2 |
| Spiel (arcmin) | ≤7arcmin | ≤7arcmin | ≤7arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin | ≤1arcmin |
| Back-EMF-Konstante | 1,54 V/Krpm | 1,54 V/Krpm | 7,1 V/Krpm | 7,1 V/Krpm | 7,52 V/Krpm | 0,1528 Vs/Rad | 7,45 Vrms/Krpm | 9 Vrms/krpm | 8V/Krpm |
| Drehmomentkonstante | 0,025 Nm/A | 0,025 Nm/A | 0,1 Nm/A | 0,1 Nm/A | 0,124 Nm/A | 0,09143 Nm/A | 0,15 Nm/A | 0,15 Nm/A | 0,12 Nm/A |
| Anzahl der Etappen | 10 | 10 | 28 | 28 | 28 | 28 | 28 | 42 | 42 |
| Spulenanschluss | Sternverbindung | Sternverbindung | Sternverbindung | Sternverbindung | Sternverbindung | Sternverbindung | Sternverbindung | Delta-Verbindung | Delta-Verbindung |
| Lagertyp | Kugellager | Kugellager | Kugellager | Kugellager | Kugellager | Kreuzrollenlager | Kreuzrollenlager | Kreuzrollenlager | Kreuzrollenlager |
| Arbeitsgeräusch (dB) | ≤55 | ≤55 | ≤55 | ≤58 | ≤60 | ≤65 | ≤65 | ≤65 | ≤70 |
| Gewicht (g) | 150 | 150 | 300 | 360 | 450 | 430 | 850 | 1550 | 2270 |
| Phasennummer | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |

